Publications and Technical Reports
2025
-
 GRoQ-LoCO: Generalist and Robot-agnostic Quadruped Locomotion Control using Offline Datasets2025ArXiv
GRoQ-LoCO: Generalist and Robot-agnostic Quadruped Locomotion Control using Offline Datasets2025ArXiv

2024
-
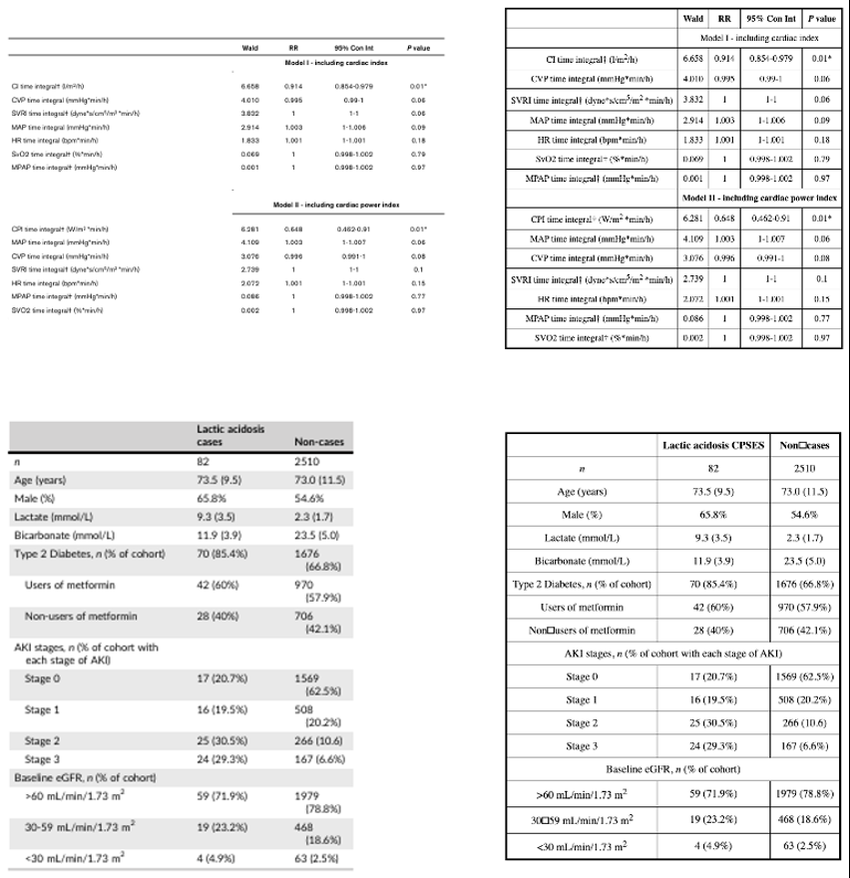 HySem: A context length optimized LLM pipeline for unstructured tabular extraction2024TRL@NeurIPS 2024
HySem: A context length optimized LLM pipeline for unstructured tabular extraction2024TRL@NeurIPS 2024 -
 MorphDLoco: Morphology aware Diffusion policy for multi-robot multi-skill locomotionApr 2024Technical Report
MorphDLoco: Morphology aware Diffusion policy for multi-robot multi-skill locomotionApr 2024Technical Report -




2023
-
 End-to-end implementation of Reinforcement based Quadruped Locomotion using PyBullet SimulationJul 2023Internship Report
End-to-end implementation of Reinforcement based Quadruped Locomotion using PyBullet SimulationJul 2023Internship Report

2022
-
 Designing Joystick Control Interfaces for Service Robot TeleoperationJul 2022Internship Report
Designing Joystick Control Interfaces for Service Robot TeleoperationJul 2022Internship Report
